AIOps自动化智能运维
-

故障自愈
无需针对告警进行手动处置。仅需预编排告警处理流程,平台根据场景自动触发,实现故障自愈。 -

周期性作业调度
通过标注运维编排模板进行日常运维操作,将周期性工作任务托管至平台自动化执行。如:智能巡检、定时开关机、定时备份等 -

更多自动化运维应用
支持诸如:软件代码自动更新、自动编译、软件自动打包/发布、应用自动发布、定时服务重启、虚拟化/云服务资源自动扩容、任务调度、自动定期数据清洗等自动化运维能力。



|
智和信通自动化运维 |
VS |
传统运维软件 |
|
控制运维复用万物监控的协议栈,万物监控与万物控制使用统一技术,深入协议底层,屏蔽设备品牌、型号差异,统一管控。 |
统一控制 |
监控与控制使用不同的技术通道,对不同品牌型号的设备需编辑多个执行脚本,且难通用。 |
|
通过原厂自带的标准协议对设备进行控制,不安装插件,兼容性好,无后门风险。 |
安全性 |
需安装Agent或插件,有后门风险。 |
|
基于万物管控模型,可控制骨干网、核心网、接入网、数据机房、软件业务、终端、物联网等联网智能设备。 |
万物可控 |
仅能控制部分常见设备如计算机和交换机;或依赖安装Agent的计算机,而对于无法安装Agent的非计算机设备无能为力。 |
|
在网络拓扑、设备拓扑、资源面板、设备列表中均可直接控制和查看结果,执行结果的步骤流程清晰可见。 |
直观操作 |
仅可在单独的控制列表中进行执行,无拓扑图操作模式,操作不便捷。 |
|
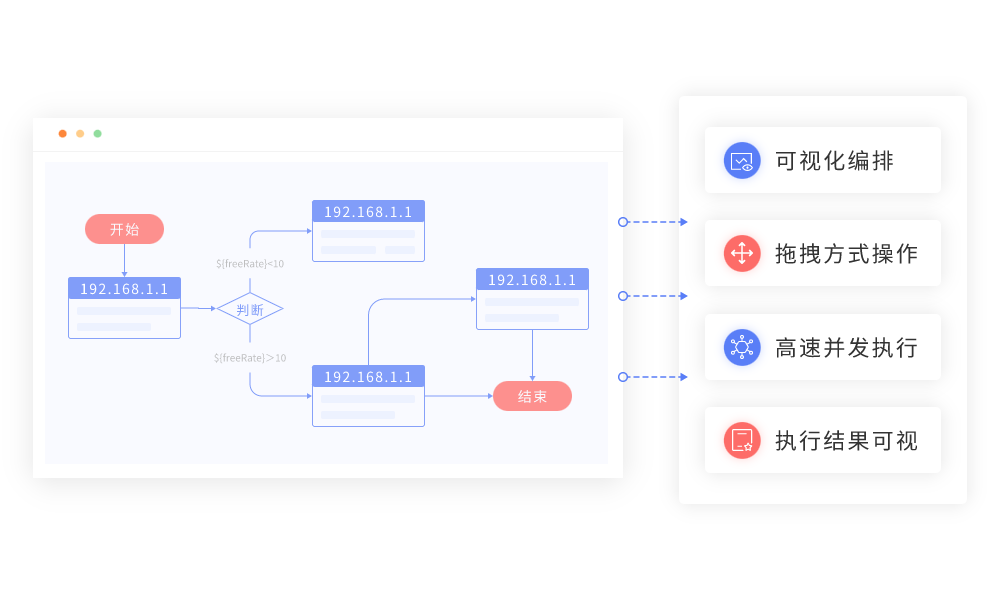
基于流程图、菜单、下拉框、拖拽、连线的方式配置流程,支持结果条件分支、参数变量。配置界面友好直观,功能强大而易于使用。 |
可视化配置 |
流程图简单,不支持拖拽、条件、下拉框、参数等模式,控制能力有限。或仅支持命令行模式编辑脚本,客户难于上手。 |
|
具有原子策略、组合策略两级模式,策略的可复用性较高,稳定性强而出错率低。 |
策略复用 |
没有两级策略模式,每步操作均需从新编写,费时费力,又容易出错。 |
|
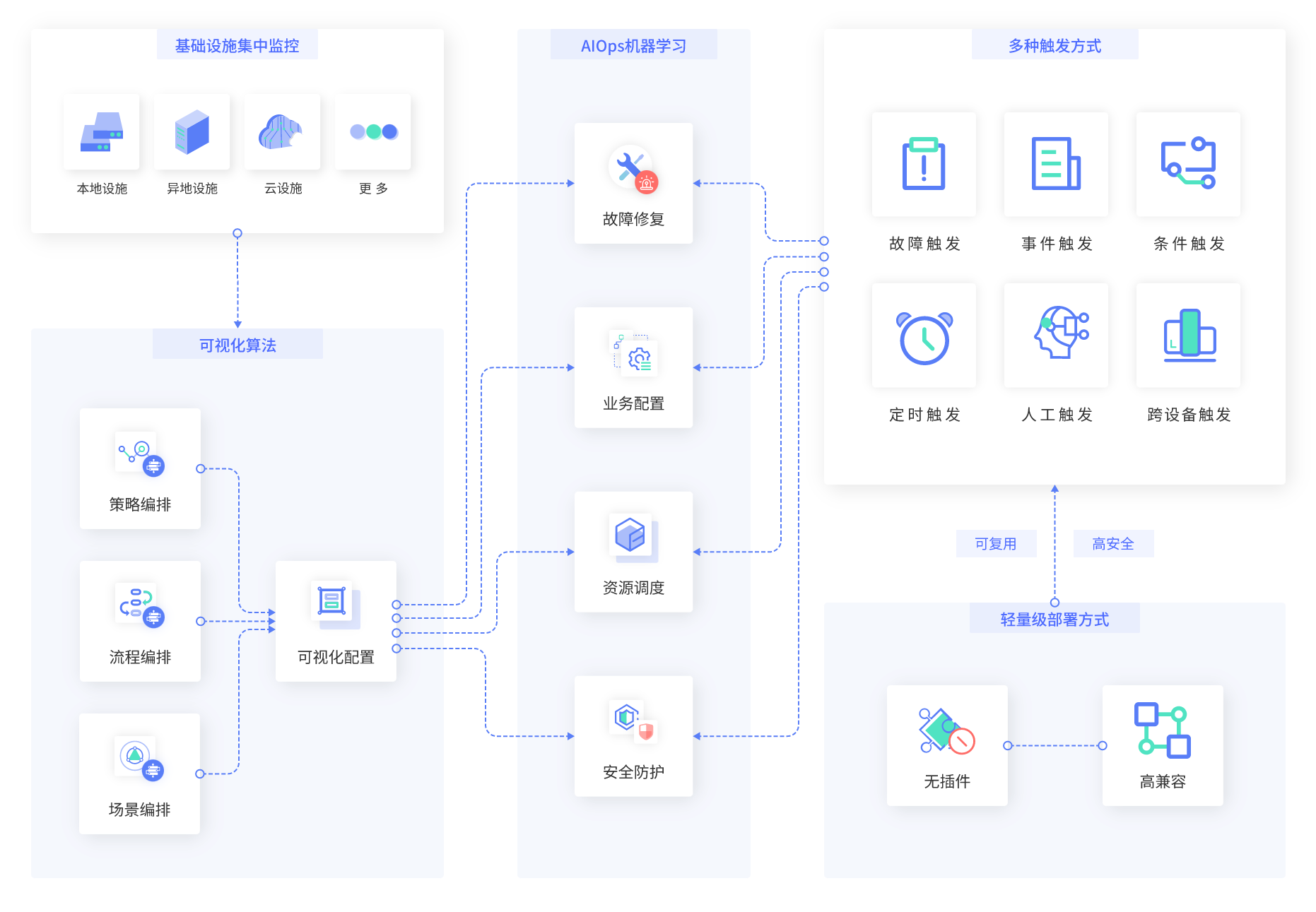
基于机器模拟人脑理论,支持故障、事件、定时、条件、人工、跨设备的多种触发形式,可实现无人值守运维和故障自愈。 |
自动化运维 |
手动触发为主,缺乏与故障、事件、时间、多设备联动,难于实现故障自愈,难于实现自动运维。 |
共同开启智慧运维之旅